
Reputation: 6451
line segment using four point intersection
I have four point p0 , p1 ,p1' , p2' , each defined by x,y,z component and all lay on one line as in the figure
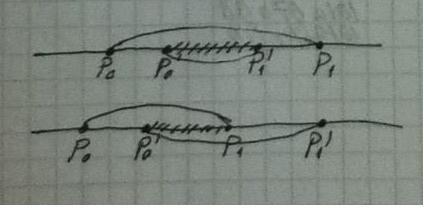
I want to get the line segment (the dashed part) result from the intersection between the four points
any suggestion , or sample code using C#
Upvotes: 0
Views: 594
Answers (2)

Reputation: 52290
This is more or less the same answer as Howard gave but pressed into C# ... I hope this helps with your code-base.
This code snippet should do the trick (finding the mid-points from your 4, but only if all are colinear) - also note I don't check for real intersection, you can do this easily youself by inspecting the answer and your points. I did not take the time and implement the Vector3D struct in a sensible manner (operators, ...) - you can do this easily too. Also note that this will work for not only 4 points but keep your diagram in mind.
private struct Vector3D
{
public double X { get; set; }
public double Y { get; set; }
public double Z { get; set; }
}
static class Vectors
{
static public double ScalProd(Vector3D v1, Vector3D v2)
{
return v1.X*v2.X + v1.Y*v2.Y + v1.Z*v2.Z;
}
static public Vector3D Minus(Vector3D v1, Vector3D v2)
{
return new Vector3D {X = v1.X - v2.X, Y = v1.Y - v2.Y, Z = v1.Z - v2.Z};
}
static public Vector3D Normalize(Vector3D v)
{
var len = Math.Sqrt(ScalProd(v, v));
return new Vector3D {X = v.X/len, Y = v.Y/len, Z = v.Z/len};
}
}
private Vector3D[] FindIntersectionOnCoLinearVectors(params Vector3D[] input)
{
if (input.Length < 2) throw new Exception("you need a minimum of two vectors");
var v0 = input[0];
var direction = Vectors.Normalize(Vectors.Minus(input[1], v0));
Func<Vector3D, double> projectOntoLineStartingAtv0 =
v => Vectors.ScalProd(direction, Vectors.Minus(v, v0));
var mapped = input.OrderBy(projectOntoLineStartingAtv0).ToArray();
return new Vector3D[] {mapped[1], mapped[2] };
}
Upvotes: 1

Reputation: 39217
You may proceed as follows:
Step 1: Transformation into a 1D-problem
- define
t(P) = (P-P0).(P1-P0) / (P1-P0).(P1-P0)where the dot denotes the scalar product tis a linear measure on the line throughP1andP0- thus we have
t(P0)=0,t(P1)=1
Step 2: Solve the problem in 1D
- We assume
t(P0') <= t(P1')(otherwise swapP0'andP1'in the following lines) - Now the following cases are possible
t(P1') < 0=> no intersection1 < t(P0')=> no intersectiont(P0') <= 0 <= t(P1') <= 1=> intersection is segment(P0,P1')t(P0') <= 0 < 1 < t(P1')=> intersection is segment(P0,P1)0 <= t(P0') <= t(P1') <= 1=> intersection is segment(P0',P1')0 <= t(P0') <= 1 < t(P1')=> intersection is segment(P0',P1)
- alternatively if you are only interested in the
t-values, the intersection is given by the line segment betweent0 = max(0, t(P0'))andt1 = min(1, t(P1'))ifft0 <= t1
Upvotes: 0
Related Questions
- The algorithm to find the point of intersection of two 3D line segment
- Segment Segment intersection in 3D
- Find if point lies on line segment
- Find the intersection points of 2 segments
- C# intersect a line bettween 2 Vector3 point on a plane
- Algorithm for finding the segment overlapping two collinear segments
- XNA line segment intersection?
- Rare case: segment and point based plane intersection c#
- Simple 3D AABB-Line Segment collision detection (intersection)
- 3D lines intersection algorithm